About
Bachelor of Applied Science in Computer Engineering (Co-op), University of Ottawa. I build embedded systems, backend services, and infrastructure automation. Working at Lockheed Martin Canada as a Junior DevSecOps Developer (since Jun 2026).
Computer Engineering · University of Ottawa
I work across hardware, software, and DevOps projects. Working at Lockheed Martin as a Junior DevSecOps Developer (since Jun 2026).
Jump to projects: Office Tracker, Surveillance System, 8-bit Processor
Bachelor of Applied Science in Computer Engineering (Co-op), University of Ottawa. I build embedded systems, backend services, and infrastructure automation. Working at Lockheed Martin Canada as a Junior DevSecOps Developer (since Jun 2026).
University of Ottawa · Sep 2021 – Present
Bachelor of Applied Science in Computer Engineering (Co-op), graduated Apr 2026
Relevant coursework: Applied Machine Learning, Real-Time Computer Systems Design, Computer Architecture I-III, Operating Systems, Data Communications and Networking, Digital Systems
Docker, Kubernetes, CI/CD pipelines, GitHub Actions, Linux, infrastructure automation, and secure deployment practices
C, C++, Python, Java, TypeScript, Go, Assembly, REST APIs, backend services, and full-stack development
STM32, ESP32, FreeRTOS, UART, SPI, I2C, GPIO, real-time firmware, and IoT systems
KiCad and Altium Designer, PCB layout and schematic capture, VHDL, SystemVerilog, FPGA design, and logic synthesis
Jun 2026 – Present · Ottawa, Ontario, Canada
May 2025 – Aug 2025 · Ottawa, Ontario · Hybrid
Sep 2024 – Dec 2024 · Ottawa, Ontario · Hybrid
Jan 2024 – Apr 2024 · Remote
May 2023 – Aug 2023 · Ottawa, Ontario · Hybrid
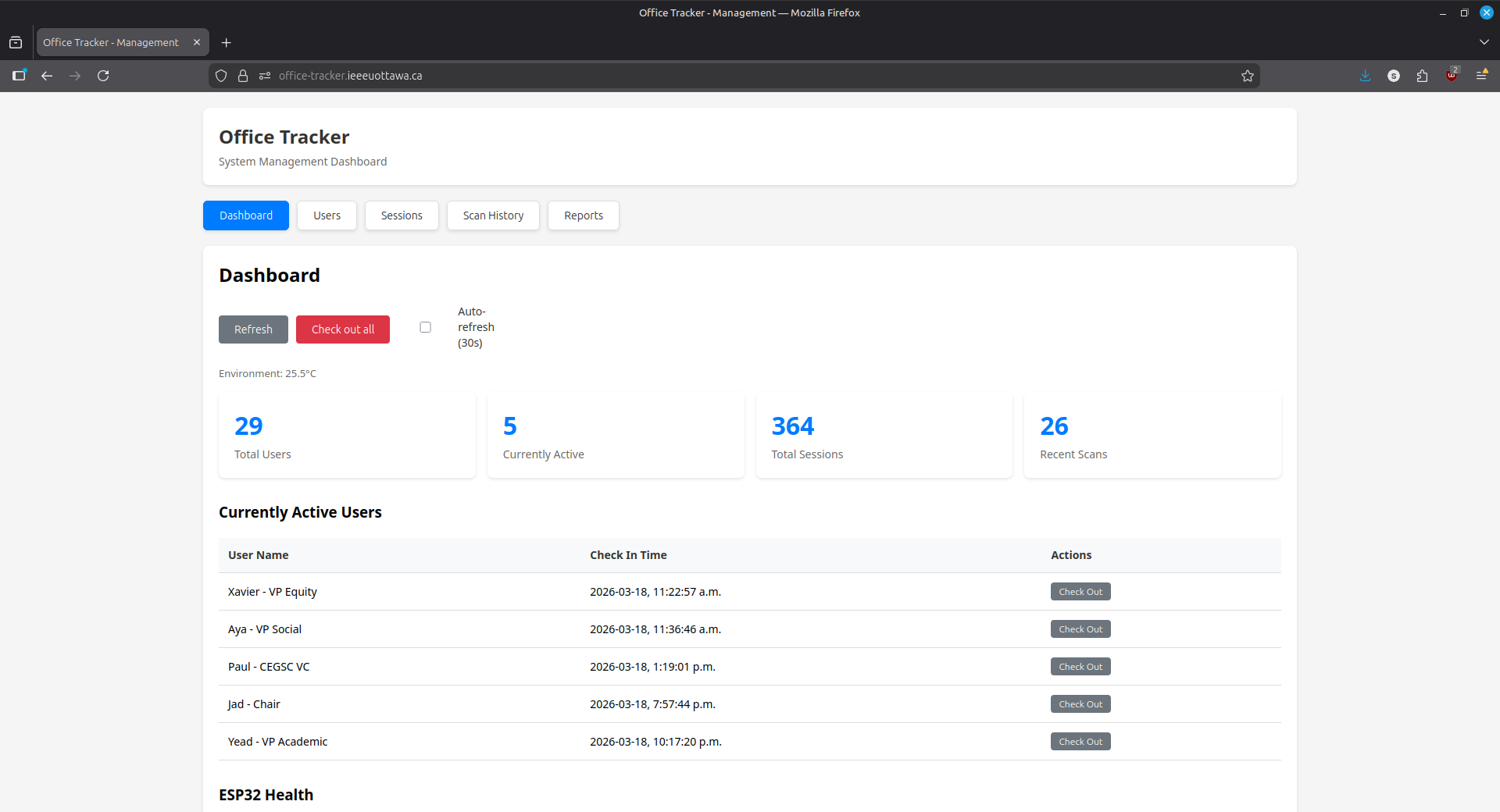
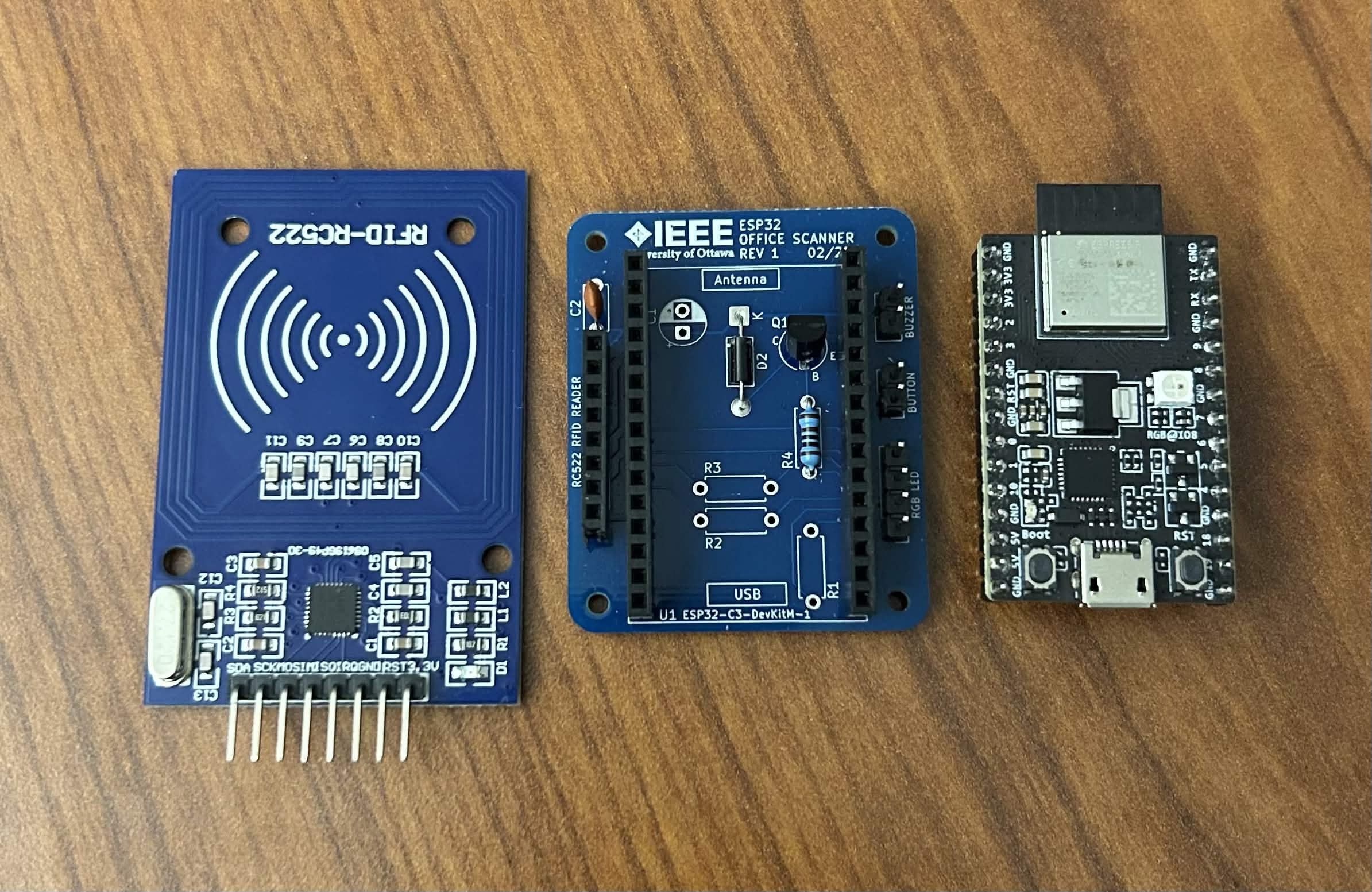
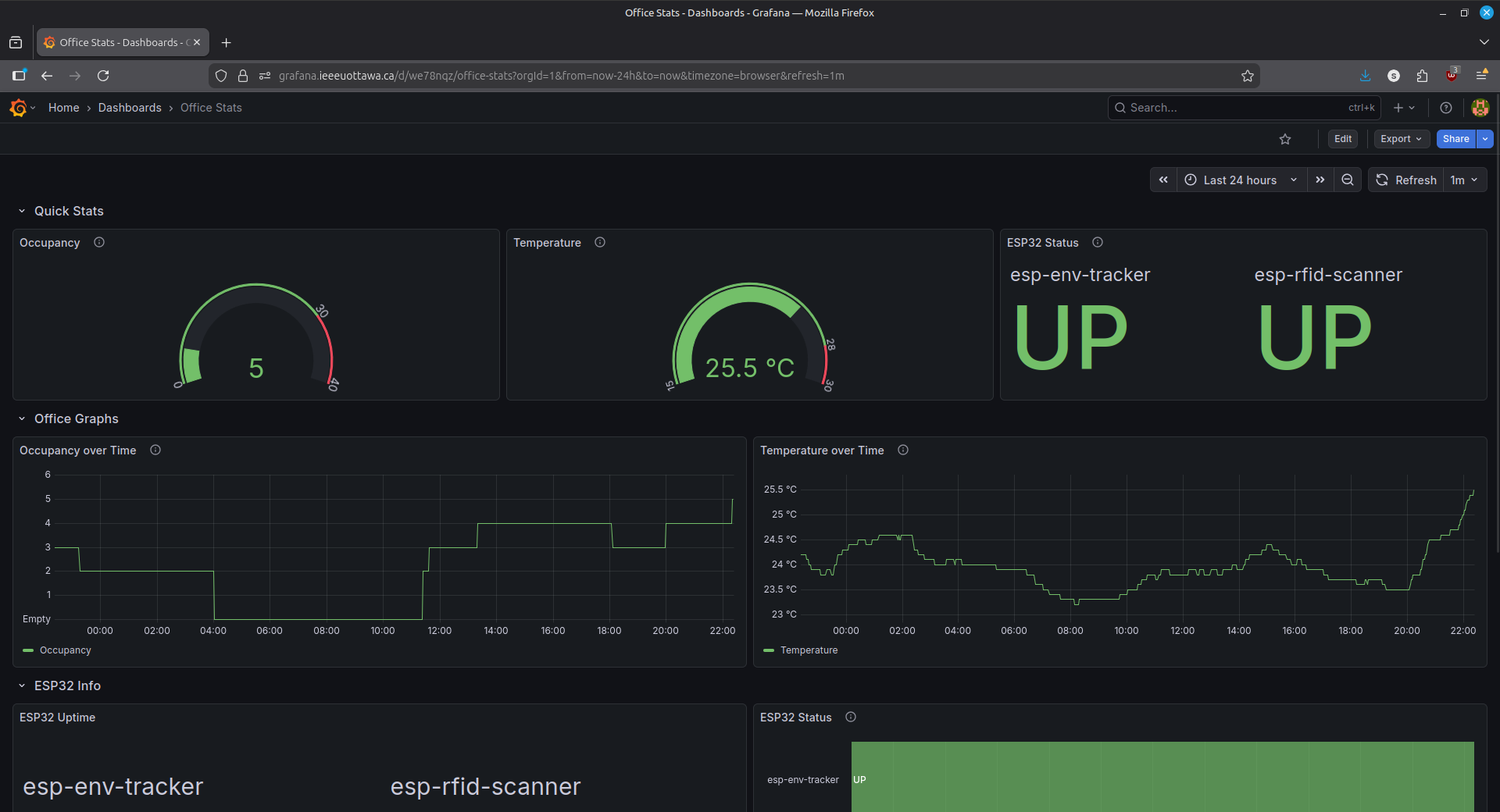
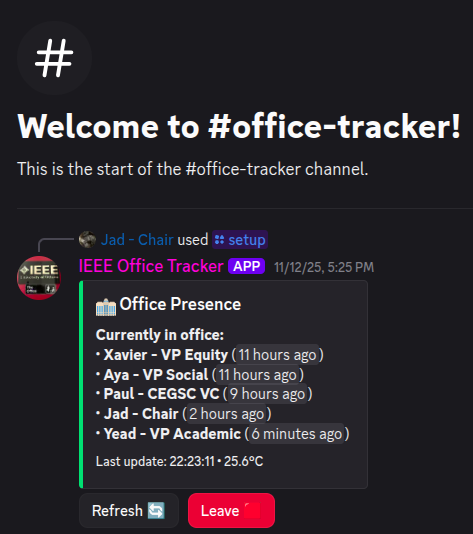
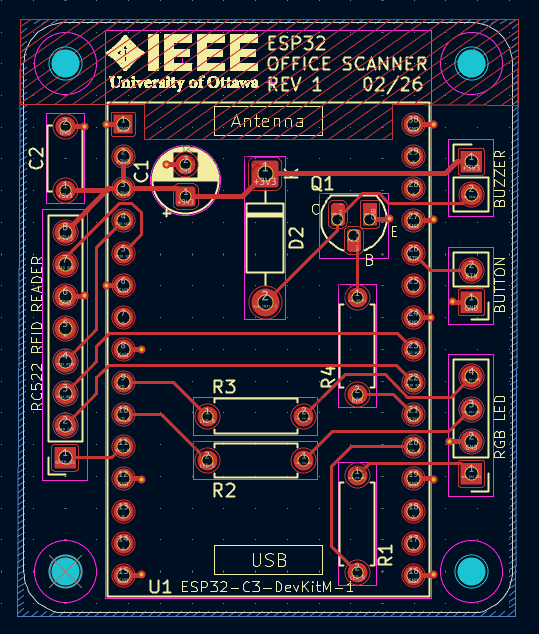
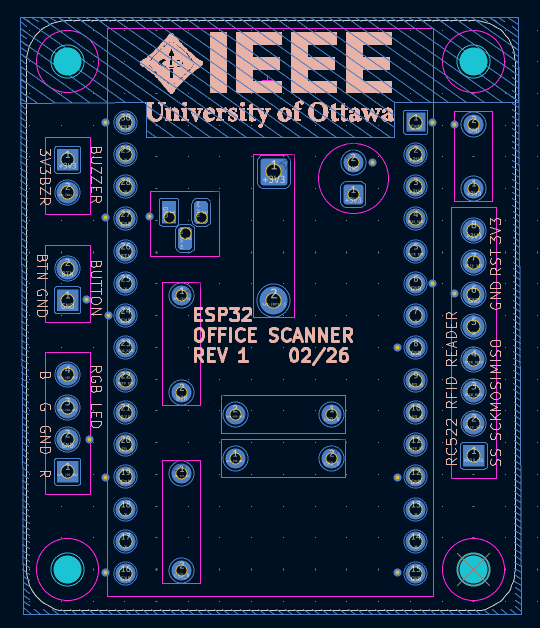
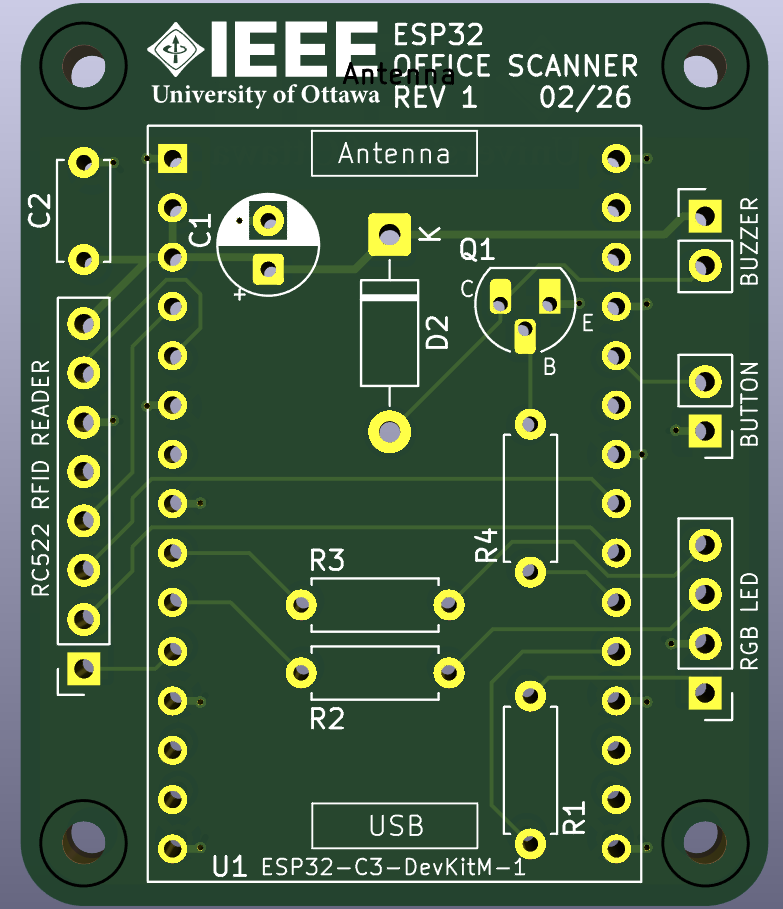
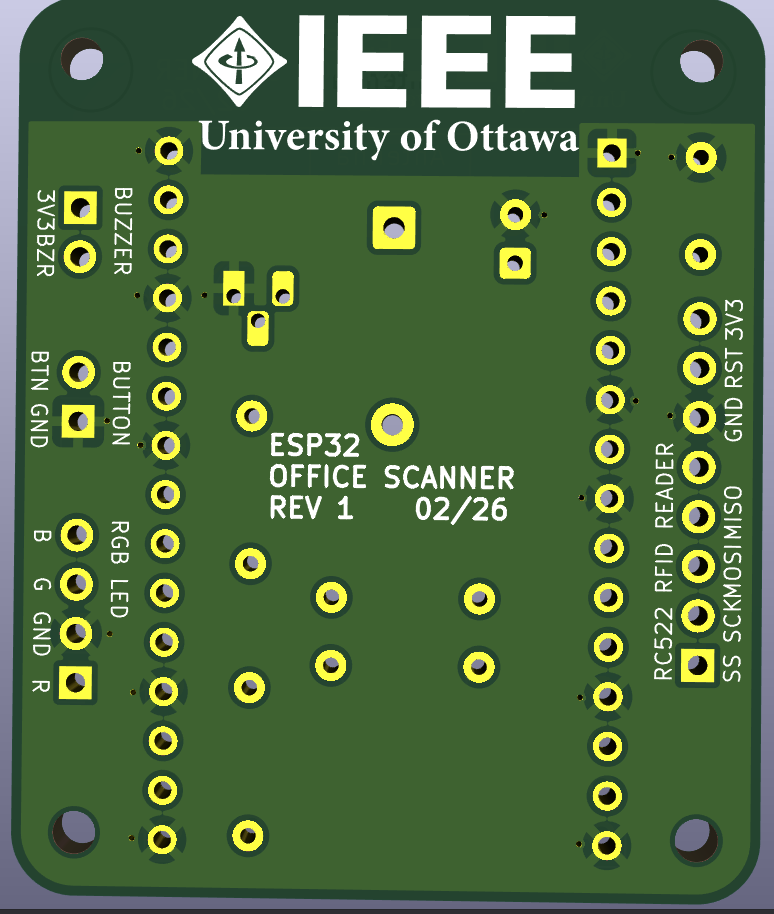
Nov 2025 – Present · ESP32, RFID, IoT, PCB Design, KiCad, Altium Designer, Prometheus, Grafana
Built and deployed a production-ready ESP32 + custom PCB system for RFID attendance and real-time office monitoring. Delivered the full-stack system from hardware and firmware to secure OTA update flows, Go APIs, Dockerized backend services, CI/CD release workflows, and server deployment with monitoring dashboards, now supporting 30+ active users in the IEEE office.
Work continues on hardware and firmware improvements for the next iteration of the system.


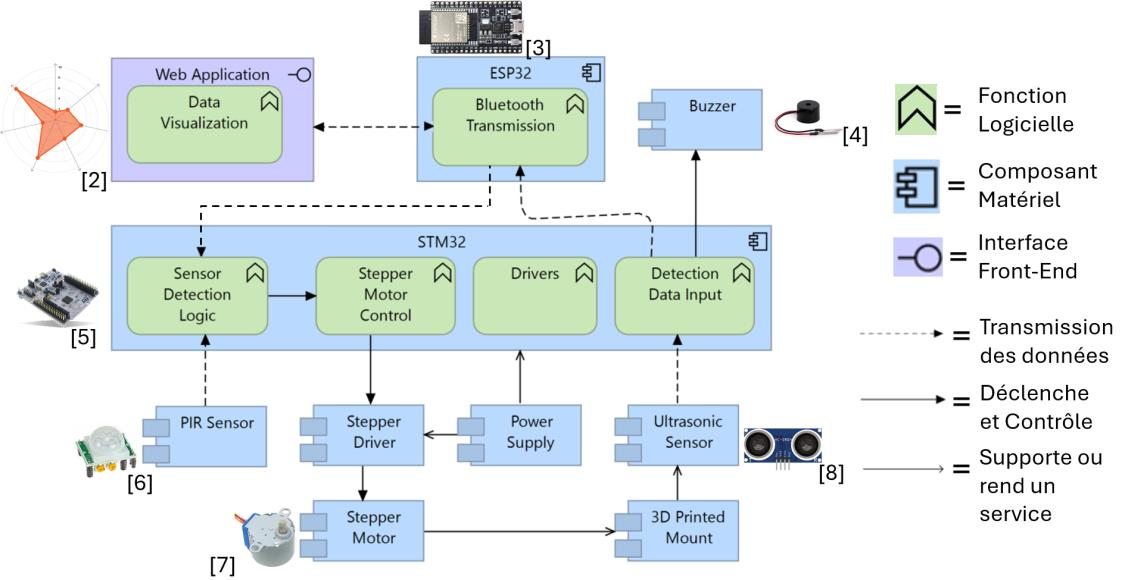
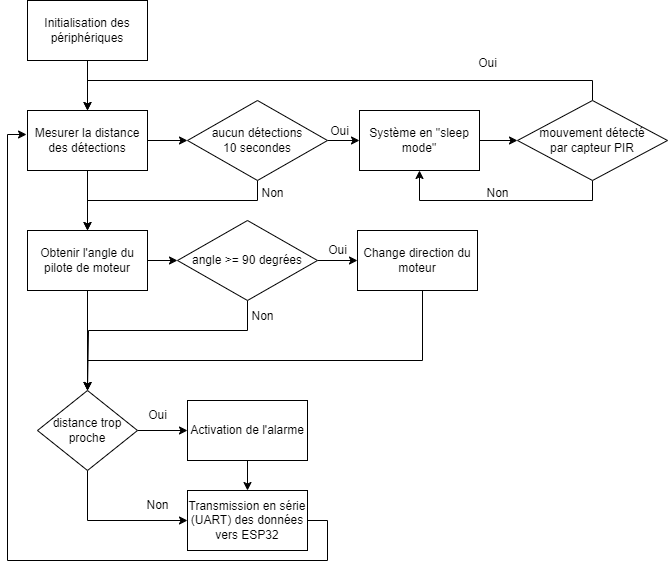
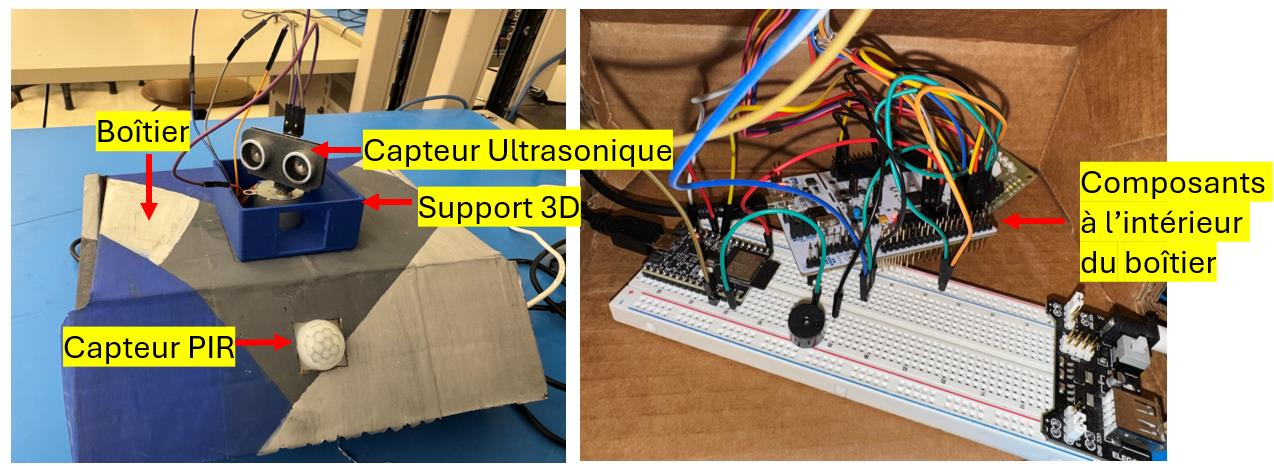
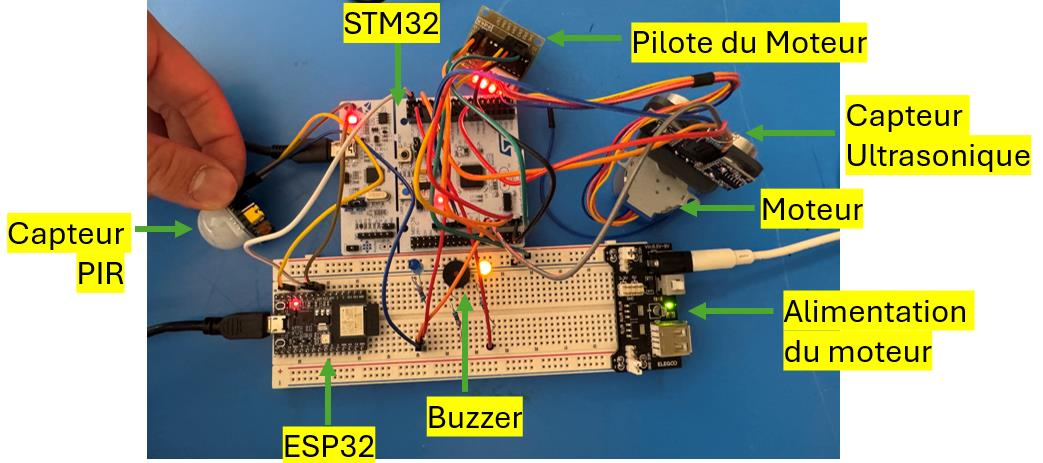
Feb 2025 – Mar 2025 · STM32, ESP32, IoT, Real-Time Embedded Control, Sensor Integration
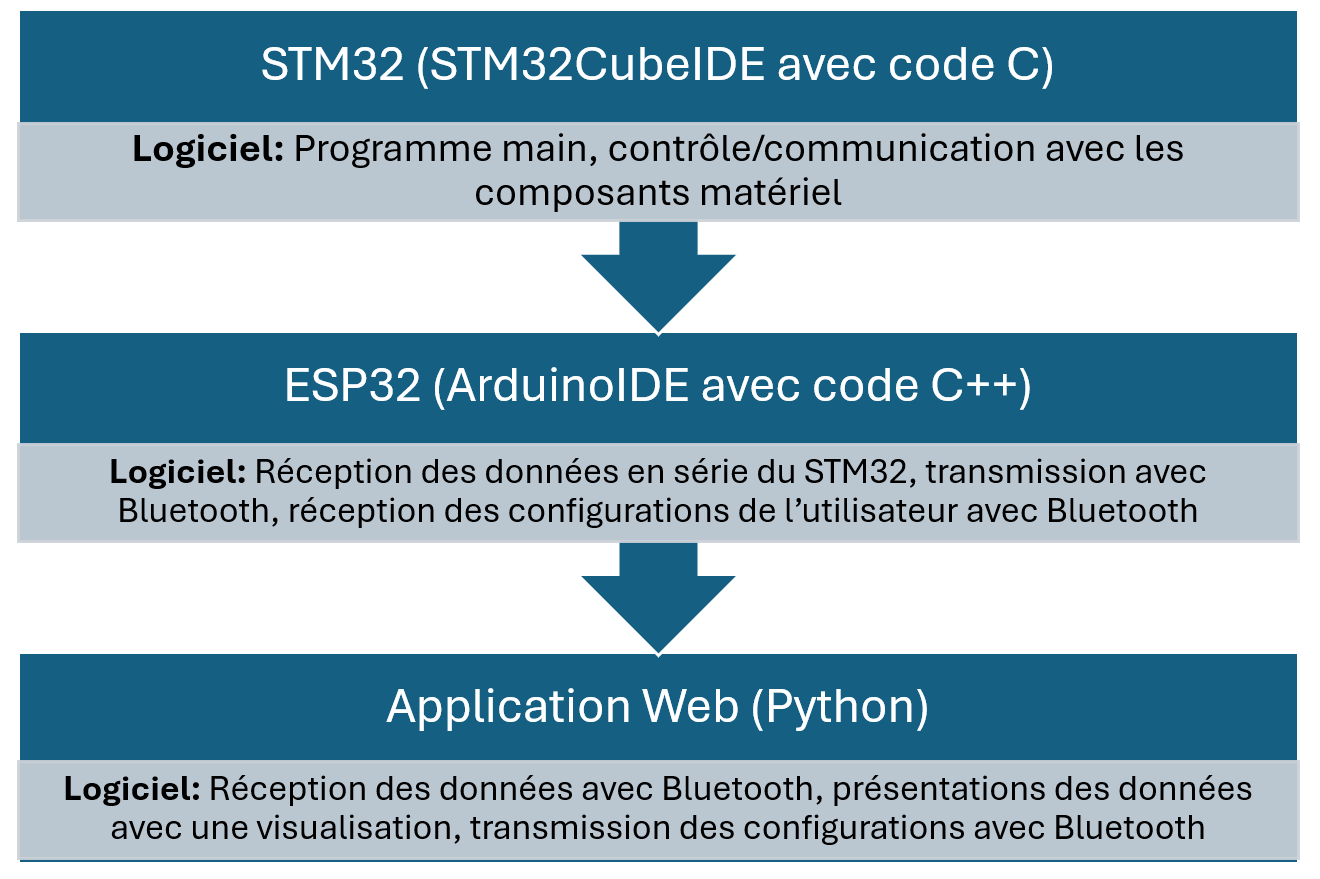
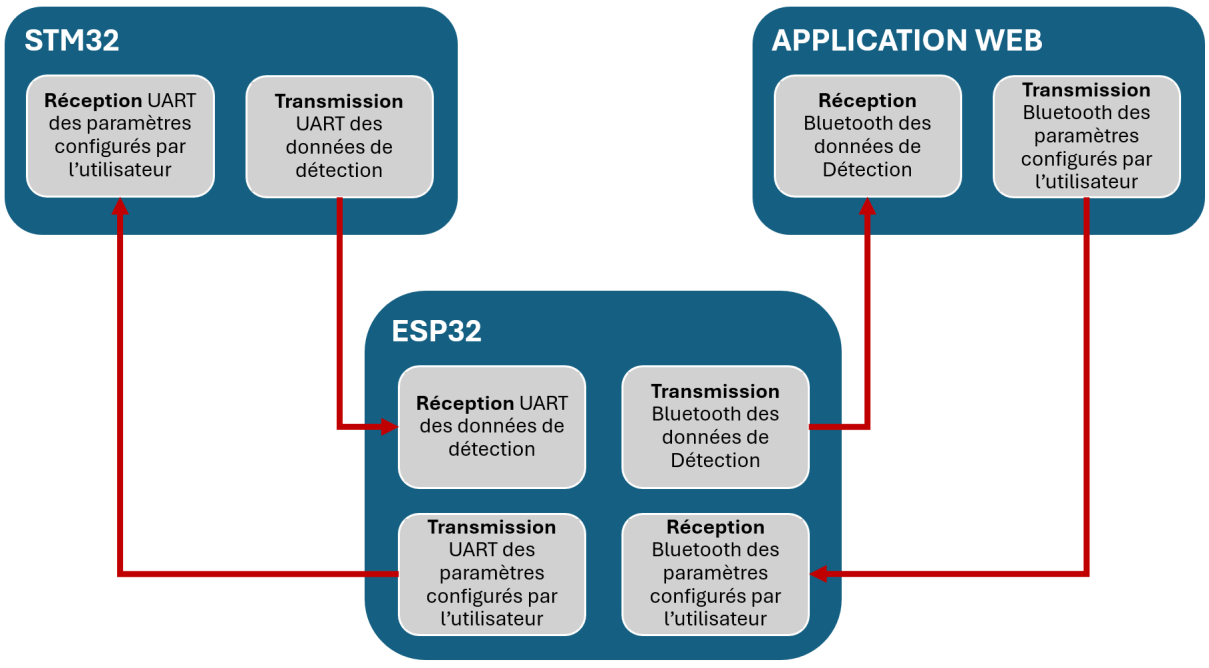
Engineered a real-time embedded surveillance platform that links STM32 sensing/control, ESP32 wireless telemetry, and a live web radar interface. Optimized for precise ranging and low-latency visualization with low-power wake behavior for practical deployment.
Oct 2024 – Jan 2025 · Digital Logic Design, Logisim, Assembly, Compiler Design
Designed a custom single-cycle 8-bit processor in Logisim with a simplified ISA and memory-mapped I/O. Extended the platform with a Python assembler and a minimal C-to-assembly compiler to run structured programs on constrained hardware.
2025 – 2026
Scaled hands-on technical training as VP Academic, helping students apply embedded and software skills directly in projects and co-op. Drove 400+ student attendees across workshops and exam prep sessions in one year.
Guides and technical notes: docs.ieeeuottawa.ca/s/guides



Issued by IEEE uOttawa Student Branch · Mar 2026
Recognized for high-impact technical mentorship and community building through workshops, academic reviews, and large-scale student initiatives.